https://www.youtube.com/@AandIROBOT
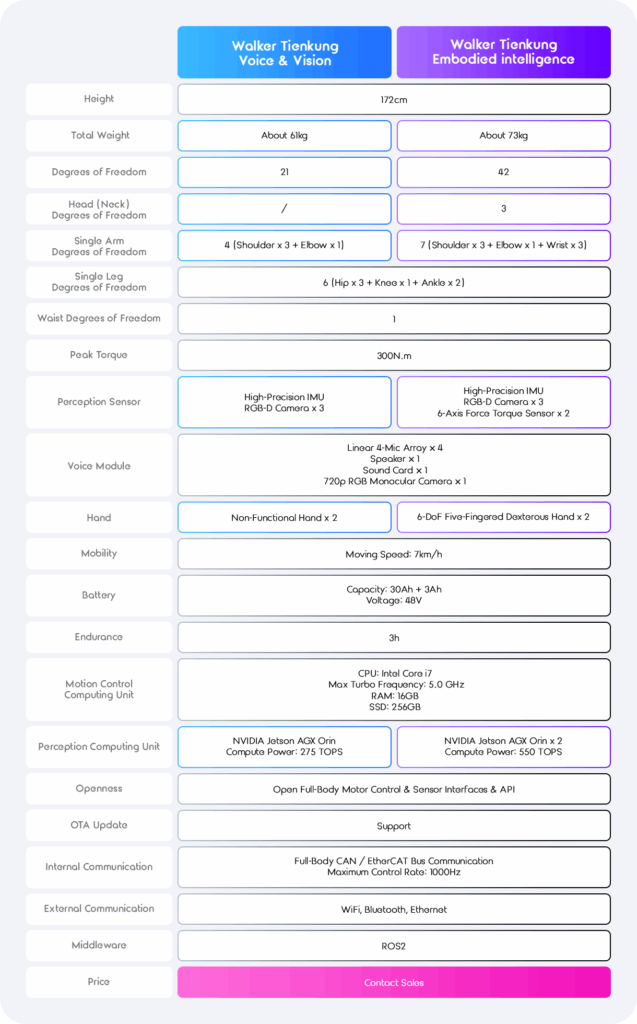
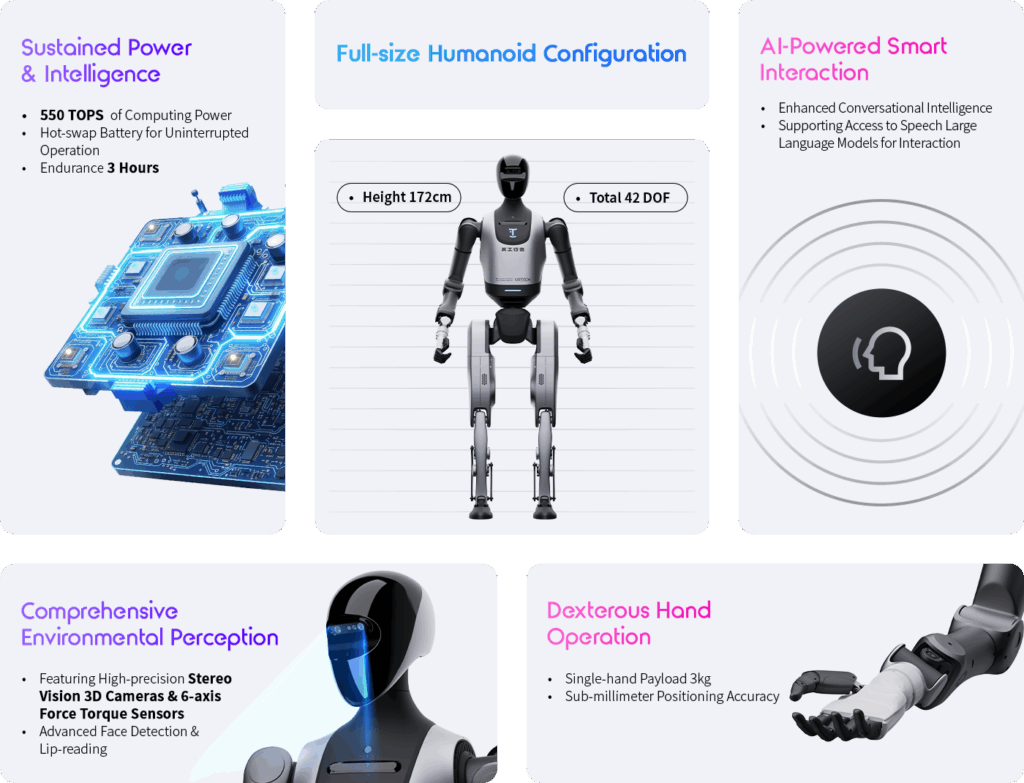
The humanoid robot UBTECH Walker Tienkung is designed for research, education, industrial and commercial applications, and home services.
Navigate Any Terrain, Effortlessly
- Intelligently Generate Adaptive Locomotion
- Maintain Real-Time Dynamic Balance
- Resistant to Impacts & External Interference
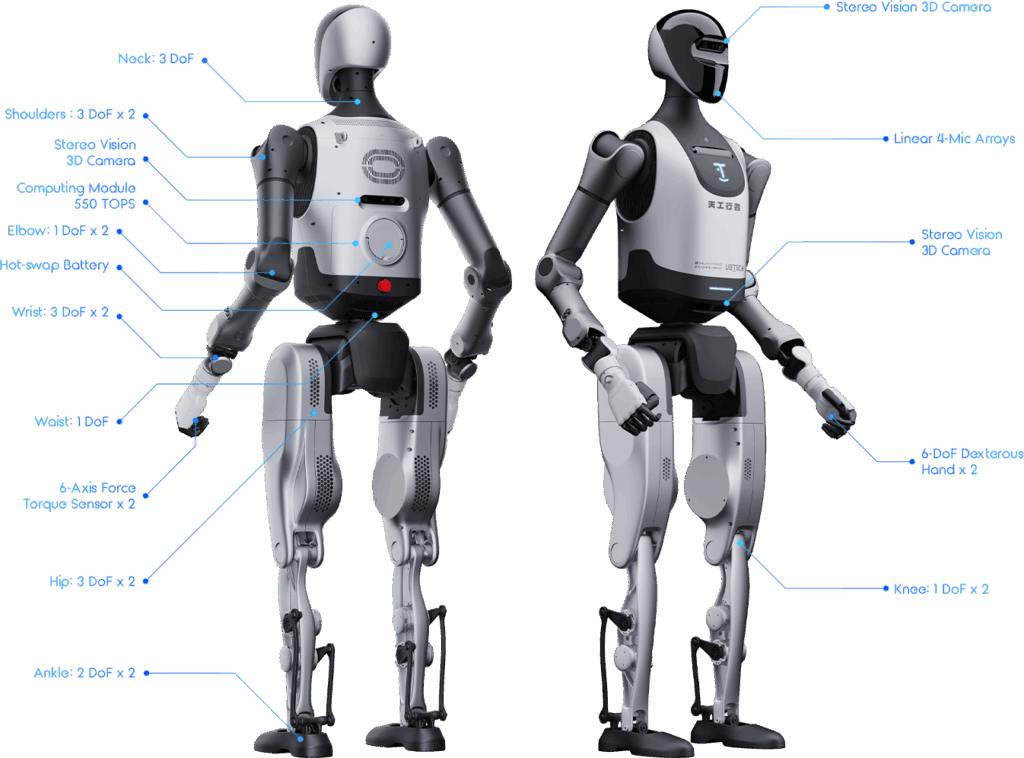
The humanoid ROBOT UBTECH Walker Tienkung is a fully open platform for unrestricted secondary development
Open Architecture Interface Design
- Open Interface for All Joints & Sensors
- Comprehensive Development Resources with Guides & Sample Code
- Full Support for Teleoperation, Data Acquisition & Secondary Development
All-in-One Development Support
- High fidelity URDF Models & Open-Source Training Framework
- Openly Integrated AMP-style Reinforcement Learning Frameworks & Complete Toolchains for Training Embodied Manipulation Policies
High-Quality Embodied AI Open-Source Datasets
Encompasses Comprehensive Robotics-related Data
- Multi-view RGB-D Images
- Proprioceptive Robot State Information
- End-effector States
- Natural Language Task Descriptions


Contact
info@aandirobot.com
www.aandirobot.com
www.youtube.com/@AandIROBOT
www.linkedin.com/in/sales-a-and-i-robot/
www.tiktok.com/@aandirobot
www.instagram.com/aandirobot/